Chapter 5 exercise
Contents
Chapter 5 exercise#
Question 1#
from scipy.optimize import fsolve
def trapzo(f,x0,tRange,h=1e-3,**kwargs):
tmin,tmax=tRange
stop=tmax+2*h
t = np.arange(tmin,stop,h) #stop value is not included
n=len(t); #get number of values
x=np.empty(n); x[0]=x0 #form output array
for k in range(n-1):
t1,x1=t[k],x[k] #labels introduced for convenience
t2=t1+h #this is the same as t[k+1]
F = lambda x2: (x2-x1-h/2*(f(t1,x1,**kwargs)+f(t2,x2,**kwargs)))
x2=fsolve(F,x1) #Solve backward difference
x[k+1]=x2
return t,x
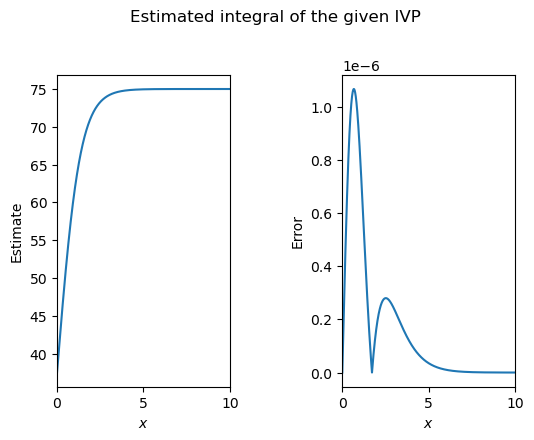
x0=75/2; tRange=[0,10]
def dxdt(t,x,r,C):
return r*x*(1-x/C)
t,x=trapzo(dxdt,x0,tRange,r=1.5,C=75)
r=1.5;C=75
xexact = C/(1+np.exp(-r*t))
myplotter(t,x,xexact)
Maximum error: 1.0682088813496193e-06
Question 2#
# Fixed point method
xg=0.2 #Initial guess
xn=np.cos(xg) #Next guess
tol=1e-7
while np.abs(xg-xn)>tol:
xg,xn=xn,np.cos(xn)
print(xn)
# Using fsolve
F = lambda x: x-np.cos(x)
xs=fsolve(F,0.2)
print(xs[0])
0.7390851672093751
0.7390851332151606
Question 3#
We can convert it to a first order system by introducing \(y=\dot{x}\) to obtain
def eulerf(F,X0,tRange,h=1e-3,**kwargs):
tmin,tmax=tRange
stop=tmax+2*h
t = np.arange(tmin,stop,h) #stop value is not included
X0 = np.array([X0]).flatten() #make x0 a 1D array
n=len(t); m=len(X0) #get number of values
X=np.empty([n,m]); X[0]=X0 #form output array
for k in range(n-1):
t1,X1=t[k],X[k] #labels introduced for convenience
X2=X1+h*F(t1,X1,**kwargs) #Euler forward difference
X[k+1]=X2
return t,X
r=1.5; C=75;
def dXdt(t,X,r,C):
x,y = X
dxdt= y
dydt=r**2*x*(1-x/C)*(1-2*x/C)
return np.array([dxdt,dydt])
X0=[C/2,r*C/4]; # initial conditions
fig, (ax1, ax2) = plt.subplots(1, 2)
fig.tight_layout(pad=5.0) #increase subplot spacing
t,X=eulerf(dXdt,X0,[0,4],r=r,C=C)
ax1.plot(t,X[:,0])
t,X=eulerf(dXdt,X0,[0,8],r=r,C=C)
ax2.plot(t,X[:,0])
plt.show()
C:\Users\Ella Metcalfe\AppData\Local\Temp\ipykernel_19844\3599465400.py:22: RuntimeWarning: overflow encountered in double_scalars
dydt=r**2*x*(1-x/C)*(1-2*x/C)
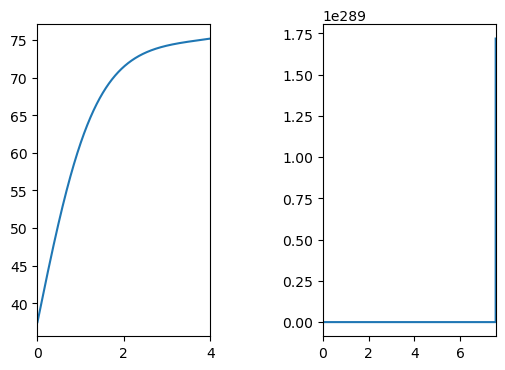
The problem appears to become stiff approacing the equilibrium state \(x=C\).
Understanding stiffness#
Stiffness is a very difficult phenomenon to study, which depends on both the problem under consideration and the method. A problem that exhibits stiffness with respect to the explicit Euler method may not exhibit the same stiffness when tackled with the midpoint method.
As we have seen, the logistic curve can be represented by either of the following equations:
The second derivative equation appears to exhibit greater “stiffness” than the first when solved with the explicit Euler method. Why is this? Some insight can be found by a geometric consideration .
First order problem#
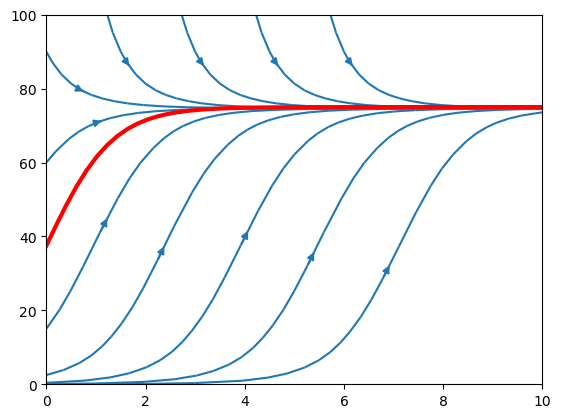
The explicit Euler formula corresponding to \(\dot{x}=f(x)\) is given by:
The solution trajectory takes forward steps along the vector direction defined by the slope \(f(x_k)\). A streamplot of the vector field for our logistic problem is shown below, along with the solution curve. Notice that neighbouring solution trajectories converge towards the solution to the IVP for the given conditions:
from numpy import linspace, meshgrid, ones, exp
r=1.5; C=75
t = linspace(0,10,10) #t vals
x = linspace(0,100,10) #x vals
T,X = meshgrid(t,x) #2D grid points
#Gridwise vector values:
U=ones(T.shape) #1st vector component
V=r*X*(1-X/C) #2nd vector component
start = [[0,15],[0,60],[0,90],[0,2.5],[0,0.4],[0,0.07],[0,0.011],
[1.5,90],[3,90],[4.5,90],[6,90]]
plt.streamplot(T,X,U,V,start_points=start,density=0.2,broken_streamlines=False)
# Smooth plot of analytic solution:
t = linspace(0, 10)
plt.plot(t,C/(1+exp(-r*t)),'r',linewidth=3)
plt.show()
Second derivative problem#
The explicit Euler formula corresponding to \(\dot{\underline{x}}=f(\underline{x})\) is given by:
The solution trajectory takes forward steps along the vector direction defined by the gradient vector \(f(\underline{x}_k)\). We will look at the projection of this vector field in the \((x,y)\) plane, together with the solution curve, which satisfies \(y=rx(1-x/C)\):
import matplotlib.pyplot as plt
from numpy import linspace, meshgrid, ones, exp
plt.rcParams['axes.xmargin'] = 0
r=1.5; C=75
x = linspace(0,100,10)
y = linspace(0,40,10)
X,Y = meshgrid(x,y)
U=Y
V=(r/C)**2 * X * (C-X) * (C-2*X)
start=[[0,10],[0,20],[0,30],[40,40],[65,40],[80,0],[90,0],
[10,0],[20,0],[30,0]]
plt.streamplot(X,Y,U,V,start_points=start,arrowsize=2,density=0.3,broken_streamlines=False)
x = linspace(0, C)
plt.plot(x,r*x*(1-x/C),'r',linewidth=3)
plt.show()
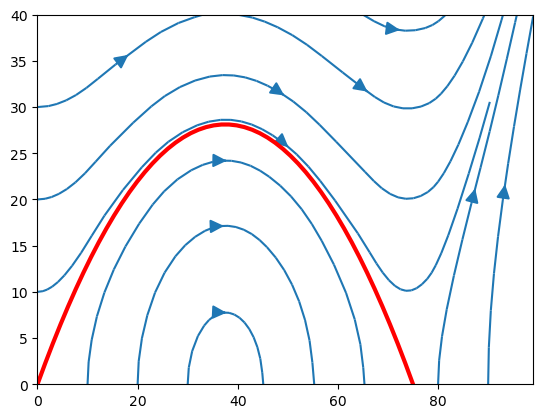
We can see that as \(x\) approaches the equilibrium solution \(x=C\) the trajectories of nearby solution move strongly away from the solution to the IVP. This explains why explicit solvers may struggle as the equilibrium state is approached.