Functions
Contents
12. Functions¶
We are probably quite used to thinking about functions when we plot graphs, such as \(y = x^2\) or \(y = \cos(x)\), as we idealise in Fig. 12.1.
Fig. 12.1 These are examples of a much richer mathematical structure, known as Functions, which we can roughly think of as a machine with inputs and outputs.¶
12.1. Definition of a Function¶
To set this up in a firmer mathematical way, we can think about functions as the mapping of elements between different sets. Lets denote the set \(A\), which contain the elements we wish to map unique to elements in another set \(B\), this mapping will be the function \(f\) from \(A\) to \(B\):
which we read as “\(f\) is a function from \(A\) to \(B\)”. The elements of the set \(A\), which we think of as the range of values in the inputs, is known as the Domain of the function and elements of the set \(B\), which we think of as the range of values of the outputs are known as the Target Set or Co-Domain of the function.
There are several notations for functions:
Notation |
Meaning |
|---|---|
\(f(x) = x^2\) |
\(x\) as a variable for the function \(f\) |
\(x \mapsto x^2\) |
\(x\) goes into \(x^2\) |
\(y = x^2\) |
\(x\) is the independent variable and & \(y\) is the dependent variable |
Given a function \(f:\, A \rightarrow B\), then for an element \(a \in A\) the function \(f(a)\) maps \(a\) to a unique element in \(b \in B\).
We call \(f(a)\) the Image of \(a\) under \(f\), or \(d(a)\) is the Value of \(f\) at \(a\) or that \(f\) Sends or Maps \(a\) into \(f(a)\).
The set of all image values is called the Range or Image of \(f\), which is denoted as:
and we should make clear that \(\text{Im}(f) \subset B\).
Given \(f: A \rightarrow B\), then for some subset \(A' \subset A\). \(f(A')\) denotes the set of images of elements in \(A'\) and if \(B' \subset B\) and \(f^{-1}(B')\) denotes the set of elements of A each whose image belongs to \(B'\):
given we call \(f(A')\) the imagine of \(A'\), we call \(f^{-1}(B')\) the Inverse Image or Preimage of \(B'\).
We also define an Identity function \(I_A\), which simply send an element back to itself, \(I_A:\,A \rightarrow A\):
for every element \(a \in A\).
Finally we can define the Graph of a function \(f:\,A \rightarrow B\) as the series of order pairs of elements \(a \in A\) mapped to elements \(b = f(a) \in B\):
A function \(f\) is defined from a set \(A = \{a,\,b,\,c,\,d\}\) into a set \(B = \{r,\,s,\,t,\,u\}\). with a mapping:
which we can represent graphically as shown in Fig. 12.2.
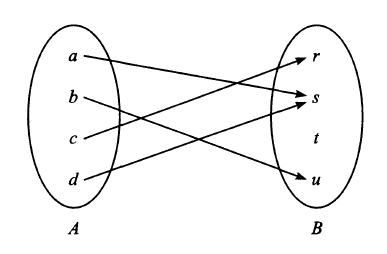
Fig. 12.2 The image \(f\) is the set \(\text{Im}(f) = \{r,\,s,\,u\}\) and the element is \(t \notin \text{Im}(f)\) because \(t\) is not the image of any element of \(A\) under \(f\) - therefore any elements not mapped to under a function are excluded from the image of the function.¶
The graph of \(f\) is the following set of ordered pairs:
12.2. Composite Functions¶
Using the idea of mapping from one set to another, it is possible to introduce functions of functions or composite functions, mapping from one set to another, through some intermediate set. Consider functions \(f:\,A \rightarrow B\) and \(g:\,B \rightarrow C\), where the target set \(B\) of \(f\) is the domain of \(g\). We can call this new function the Composition of \(f\) and \(g\), denoted by:
where we emphasise that the composition of functions is read from right to left (and not left to right as we usually do). We picture this in Fig. 12.3.
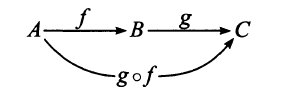
Fig. 12.3 We can introduce more and more functions and same rules apply, however we can also consider the associativity of the composition of functions, given \(f:\,A \rightarrow B,\,g:\, b \rightarrow C,\,h:\,c \rightarrow D\).¶
The composition law is also associative:
which we prove diagrammatically in Fig. 12.4.
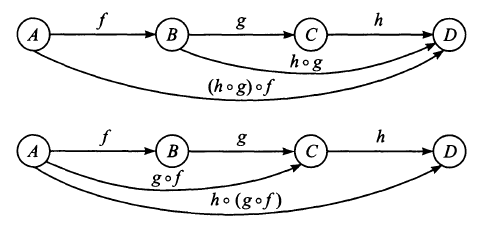
Fig. 12.4 Associativity of composite functions.¶
Lets think about two simple functions:
We can composite these functions by writing:
where we notice that in general \(f(g(x)) \neq g(f(x))\). These composite functions can be built up by looking at the function on the furthest right and then adding more functions on to the left hand side. Suppose we introduce a third function:
then the six different functional compositions would be:
and we see that the associativity of these composites can be shown to be true:
12.3. Invertibility of Functions¶
A function \(f:\,A \rightarrow B\) is said to be one-to-one or Injective if different elements in the domain \(A\) have distinct images, i.e.
Likewise we can set up a function \(f:\,A \rightarrow B\) is said to be an onto function or Surjective if every element \(b \in B\) is the image of some element \(a \in A\), i.e. the image of \(f\) is the entire target set \(B\):
A function \(f:\,A \rightarrow B\) is said to be invertible if there exists a function \(f^{-1}:\, B\rightarrow A\) such that:
A function \(f:\,A \rightarrow B\) is invertible iff \(f\) is both one-to-one and onto. We say such functions are a one-to-one correspondence between \(A\) and \(B\). This is also known as a Bijection.
Lets consider functions \(f_1:\,A \rightarrow B\), \(f_2:\,B \rightarrow C\), \(f_3:\,C \rightarrow D\), \(f_4:\,D \rightarrow E\) depicted in Fig. 12.5
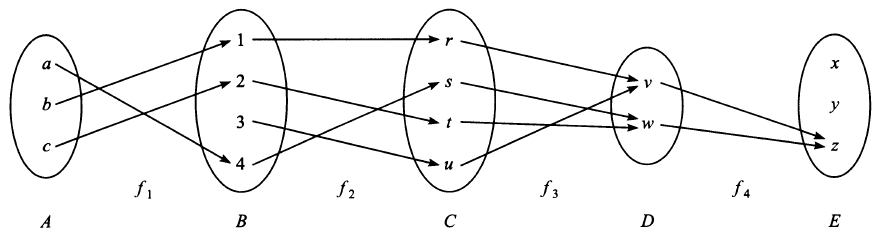
Fig. 12.5 Invertibility of four functions which map elements from \(A \rightarrow B \rightarrow C \rightarrow D \rightarrow E\).¶
\(f_1:\,A \rightarrow B\) is one-to-one but not onto, since every element in \(A\) has a unique image, but element \(3 \in B\) does not have any image under \(f_1\).
\(f_2:\,B \rightarrow C\) is both one-to-one and onto, i.e. it is a onto-to-one correspondence for all elements in \(B\) and \(C\) and thus \(f^{-1}:\, C \rightarrow B\) exists.
\(f_3:\,C \rightarrow D\) is not one-to-one but is onto since \(f_3(r) = f_3(u) = v\), but every element in \(D\) has an image under \(f_3\).
\(f_4:\, D \rightarrow E\) is neither one-to-one nor onto, since \(f_4(v) = f_4(w) = z\) and there are elements in \(E\) which are not images under \(f_4\).